What is FlexiBowl®?
FlexiBowl® is the flexible parts feeding system for automated production lines using industrial robot or cobots. It is patented and produced by ARS S.r.l. and sold in more than 40 countries worldwide, including through authorized distributors.
FlexiBowl® optimizes parts feeding by ensuring more parts are available for pick-up by the gripper in every cycle. The system improves overall feed rates, increases productivity and reduces changeover times.
How does the flexible system work?
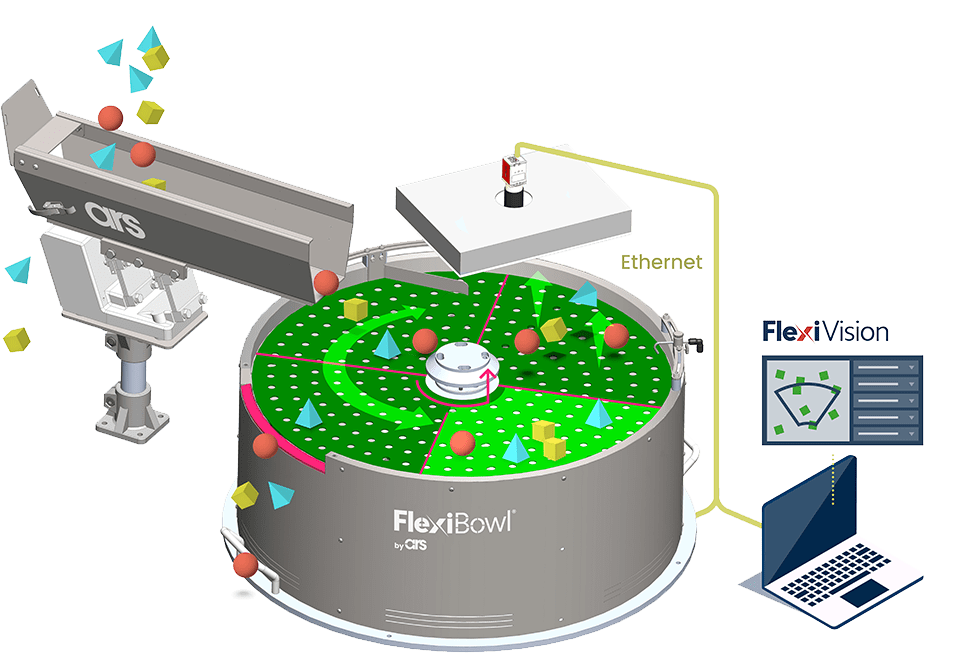
The parts are fed onto a disc by one or more hoppers and positioned optimally. The combined action of the pulse generator and the rotational movement means every single part is quickly stabilized so that the robot can pick and place it as efficiently as possible.
Which plug-in do you need?
Communication between the robot, PLC or vision system and FlexiBowl® is actuated via Ethernet or I/O and made easier by a communication plug-in available for almost all industrial robots and PLCs.
Interactive FlexiBowl® scheme
By clicking on the blue buttons in the image below, you can discover the FlexiBowl® interactive map that allows you to find out more about the functions of this cutting-edge flexible parts feeder system.
Digital I/O, TCP/IP,
UDP, Ethernet-IP
Drops components and rear emptying
Diverts components from the ring
Custom Discs upon request
Separates components
Automatic Product Changeover
Quick Disc Change
Sends parts coordinates to the robot.
Controls feeder movements and manages
the parts flow from the hopper.
Parts database manager.
simultaneous activities.
Dropping
simultaneous activities.
Separating
simultaneous activities.
Picking
simultaneous activities.
Recirculating
Diverts components
from the ring
New Product:

From the constant dialogue with the market, FlexiBowl®1200 is born.
A newer, larger, and more efficient model, designed to:
Its vast surface makes it the largest flexible feeder on the market. The increased gripping area and the ability to handle a wider range of component allow the introduction of flexible automation in new processes.
Ready to find out more?
Download our latest brochure
About FlexiBowl®
Traditional operating mode, FlexiTrack, or Multiple Parts Feeding: in any mode, the vision system ensures control over all FlexiBowl® functionalities.Durable materials, numerous disc surface types to meet specific resistance and adherence needs, vibratory or conveyor hopper formats and dimensions optimized for different processes and production lines, optional dispersion tool, and quick-emptying function.
Industries
FlexiBowl® is employed in a variety of production settings by companies in all types of industries, and meets the specific needs of the production systems in which it is installed.
 (1875 × 150 px)")

